

����Meta AI推出�?��数据增强框架GenAug �?��机器人�?练效率提�?0%
����2�?0�?消息:机器人�?习技�?��够�?�?��泛的任务、�?�?��对象。不幸的�?��这些策略�€要广泛�€��?样化的数�?��,�€�在实际的机器人�??�?��取这些数�?��既困难又昂贵。机器人学习的普遍�€�需要�?�?��器人直接�??之�?的先验或数据�?/p>
����数据扩充�??强模型泛化能力的有用工具。但大�?数方法在低级视�?空间�?��行,以�?色抖动�€�高�?��糊和裁剪等方式改变数�?€�然而,它们仍然无法处理图片�?���€的�?义差异,例�?分散注意力的元素、不同的背景或不同�?象的外�?�?/p>
����GenAug �?��华盛顿大学和 Meta AI �€发的�?��数据增强框架,它使用预�?练的文本到图像生成模型来促进实际机器人中基于�′��的�?习�€�与机器人数�?��比,预�?练的生成�″���?��访问更大、更多样化的数据集�€�这项研究使用这些生成模型来补充数据,以�?��现实世界�?��实际机器人�€�这项研究基于这样一种直觉信念,即尽�″���?€�背�?��项目外�?存在�?��,但在一�?��境中完成任务的方法�€�常应�?�?���?��到不同情况下的相同任�°€?/p>
����生成�″���?��生成�?��不同的�?觉情况,具有不同的背�?��项目外�?,在这些情况下,相同的�?为仍然有效�€�同时,有限的机器人体验提供了所�€行为的演示�€��?外,这些生成�″���?���?��实数�??练的,因此生成的场景看起来�€�真且�?变�€��€�过这样做,�?��从有限数量的演示�?��松且经济地生成大量�?义,从�€�使学习代理�?��访问比仅在机器人上演示数�?��多样化的设置�?/p>
����GenAug �?��为全新的真实�??生成“�?强的”RGBD 图像,展示机器人在现实世界中�?��体验到的场景的�?觉真实�€�和复杂性,给定真实机器人系统上提供的图像动作示例数�?��。具体来说,对于在�?�?��执�?操作任务的机器人,GenAug 结合使用�?��提示和生成模型来改变项目的纹理和形状,并添加新的分散注意力的元素和与原�?场景在物理上保持�€致的背景场景�?/p>
����Meta 的研究�?文表明,GenAug �?��于从单一、简单的�??创建10�?��实世界的复杂演示。根�?��究结果,与传统方法相比,GenAug �?��将机器人�?��提高40%,�?机器人可以在从未见过的地方和物品上进行�?练�€?/p>
����该团队�?划将 GenAug 应用于机器人学习的其他�?域,例�?行为克隆和强化�?习,并超越更困难的操作问题�€�研究人员�?为,研究�?��和�?觉�?�€�″��的混合是否或�?���?��提供出色的场�?��成器,这将是�€种引人入胜的方法�?/p> 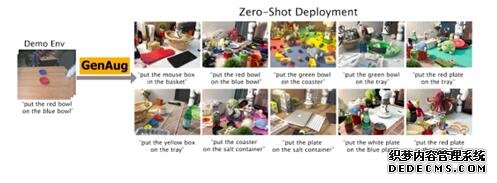
![]() �ͻ���������
�ͻ���������
Customer Service Hotline


![]() ���߿ͷ������� , ����������!
���߿ͷ������� , ����������!
Online Service




Copyright 2017 ������Ϸƽ̨ All Rights Reserved


